At the end of high school I took a field trip to the Museum of Modern Art in New York City. There were so many memorable moments, from standing mesmerized in front of Van Gogh’s Starry Night to pondering the minimalist’s perfect piece (otherwise known as the blank canvas). But what captured my imagination for years to come was an exhibit showcasing the marriage of science and design.
If asked to imagine science-inspired design, people might reach for examples of biomimicry, which is the design of tools or structures by modelling them based on biological processes or organisms. Some neat examples include designing gecko-inspired adhesives to scale walls more efficiently, mimicking the desert beetle’s ability to capture water from thin air to aid water-scarce regions, and learning from plants’ effectiveness in converting sunlight into nutrients to build solar panels that can capture light more efficiently and thus generate more electricity.
Another approach uses living organisms within designs, such as building 3D printers with living cells as ink to promote tissue regeneration and reparation or manipulating E. Coli’s carbon storage system to produce more biofuel. In these cases,organisms may be coaxed to carry out objectives through switches that we turn on or off. Unfortunately, we don’t have complete control over them. But what if we can redesign living cells?
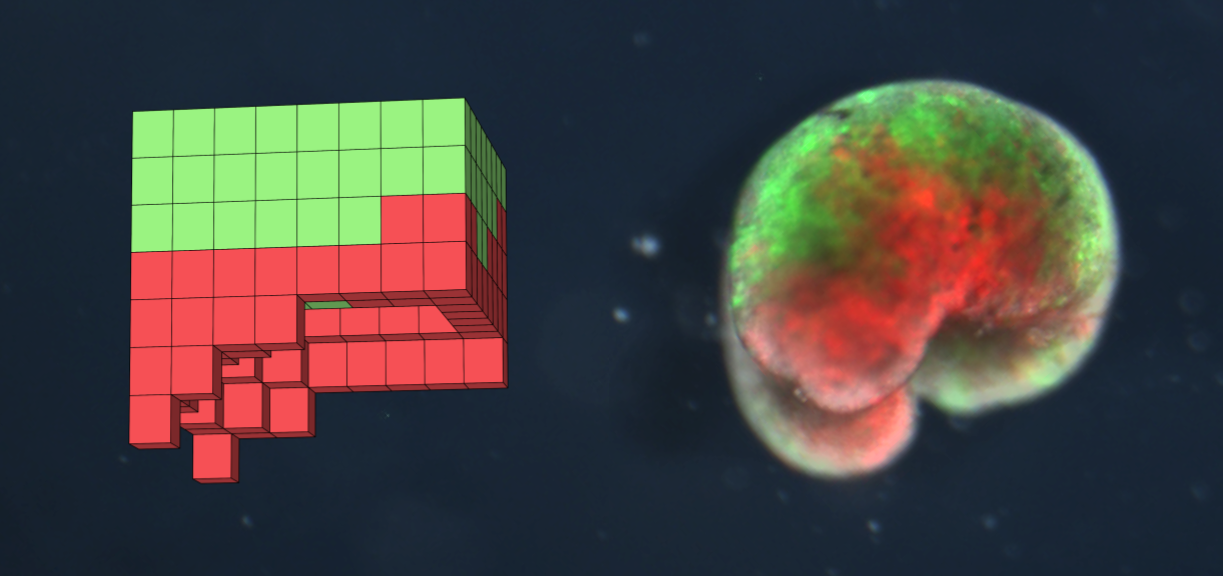
In a paper published by the Proceedings of the National Academy of Sciences, researchers built what they dubbed ‘Xenobots’, or reconfigured organisms made up of stem cells from the embryos of the African clawed frog (Xenopus laevis). They started by feeding a computer introductory information such as the cellular building blocks and the desired task to be performed. This information is passed through an ‘Evolutionary Algorithm’, which is a set of instructions that is meant to simulate the process of natural selection.
The process is continued by creating a population of possible cellular configurations of the Xenobots. Then, they score how well these configurations perform the desired task through a “fitness function” in a virtual environment.The researchers pick the best scoring configurations to give rise to the next generation of Xenobots. The computer then simulates the addition of new genetic material through mutation (random changes in the genetic code) so that the offspring do not exactly match their parents, slightly altering simulations to increase the range of possibilities and thus giving a broader space to search for the best performing simulations. This process of scoring performance and using the best performers to create the new generation happens repeatedly for a number of trials until all trials are exhausted or the designs reach a high enough level of performance. From there, the program selects designs that would be unlikely to perform well in real-life, and a further filter is made to get rid of designs that are unlikely to scale up or cannot be realistically imitated with the tools the researchers had on hand.
{kind=link}
Now it is time to put the designs to work! After harvesting cells from the embryos and pooling them together to form tissue, they shape tissues to mimic the best performing designs using the combination of forceps and an electrode (the link to a video showing this is at the end of the post). The resultant Xenobots are placed into the natural environment to see how well they perform compared to the predictions made in the simulation phase. The Xenobots were designed four different times to study different aspects of behavior: how far they were able to swim, how well they could remove debris, how well they could transport objects using an inner pouch, and how they would interact with other Xenobot configurations. You can play around with their designs using the code provided here.
One of the major downsides is that the Xenobots are designed manually, so the efficiency of the Xenobots and the ability to replicate their predicted outcomes is dependent on how well the designers can mimic them, which will lend variability to the results from lab to lab (or even from person to person). Furthermore, while it might not be too difficult to mimic a frog’s aquatic environment, it might be harder to successfully simulate conditions within the human body or other environments when there are more variables to consider and adjust for. However, given how new of a concept it is, there are so many potential avenues for these technologies that one could dream up; for example, Xenobots can be programmed to remove pollutants from the water, transport drugs to targeted areas of the human body (such as drugs that can traverse the blood-brain barrier), or be trained to interact with and block the actions of harmful bacteria or viruses. Nevertheless, this research revolutionizes our ability to use nature as a tool to better our lives.
Peer edited by Madigan Bedard
What goes into programming xenobots? What are the constraints? Is there any translation to computer data sizes like 1-bit computation?